Brushed vs. Brushless ESCs: Choosing the Right Motor Controller for Your Robot
Ever wondered what the deal is with brushed and brushless ESCs? You’re in the right spot! In this blog, we’re going to break down what these two types of electronic speed controllers are all about. We’ll look at how they work, the pros and cons of each, and help you figure out which one is best for your needs. Whether you’re into drones, robots, or RC cars, we’ve got you covered. Let’s dive in!
Table of Contents
Introduction
Are you confused about which ESC to choose for your motor? and What’s the difference in both types of ESCs? Lets clear the confusion in this blog. When it comes to controlling electric motors, there are two main options: brushed and brushless ESCs. These controllers are like the brain of the motor, determining how fast it spins and in which direction. But they work differently and have their own pros and cons. Let’s break it down simply, comparing brushed and brushless ESCs to help you decide which one is right for your project.
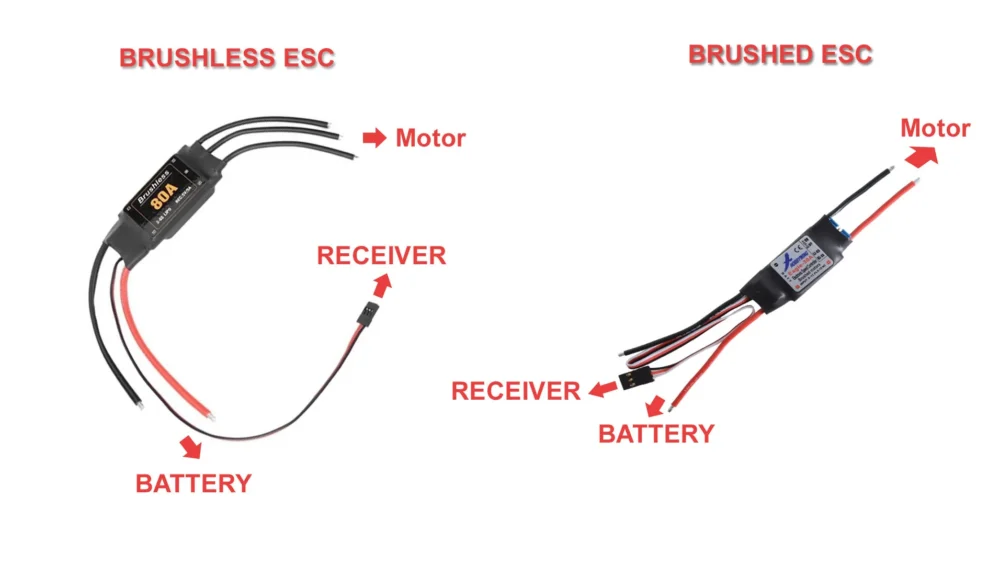
What are Brushed ESCs
So, a brushed ESC is like the old-school version of controlling motors. Instead of fancy electronic stuff, it uses good old mechanical commutation – you know, brushes making contact with the motor’s commutator. It’s kinda like how things used to work before everything went digital.
- Uses Mechanical Commutation:
So, instead of fancy electronic tricks, brushed ESCs rely on good ol’ physical brushes. These little guys make contact with the motor’s commutator, basically controlling the flow of juice through the motor. - Has Two Phases:
Picture this: the motor’s got two phases, kinda like two separate power lanes. The ESC sends power through these lanes in a sequence, making the motor spin like a champ. - Low Frequency Current Switching:
Unlike those high-pitched frequencies in brushless ESCs, brushed ones keep it chill. They switch the current at slower speeds because, you know, they’re dealing with mechanical stuff. - Designed for Brushed Motors:
Think of brushed ESCs as the best buds of brushed motors. They’re tailor-made to boss around these motors, telling them when to speed up, slow down, or switch directions.
In a nutshell, brushed ESCs are like the laid-back cousins of the ESC world, using mechanical tricks, handling two-phase power, chilling with low-frequency currents, and hanging out exclusively with brushed motors.
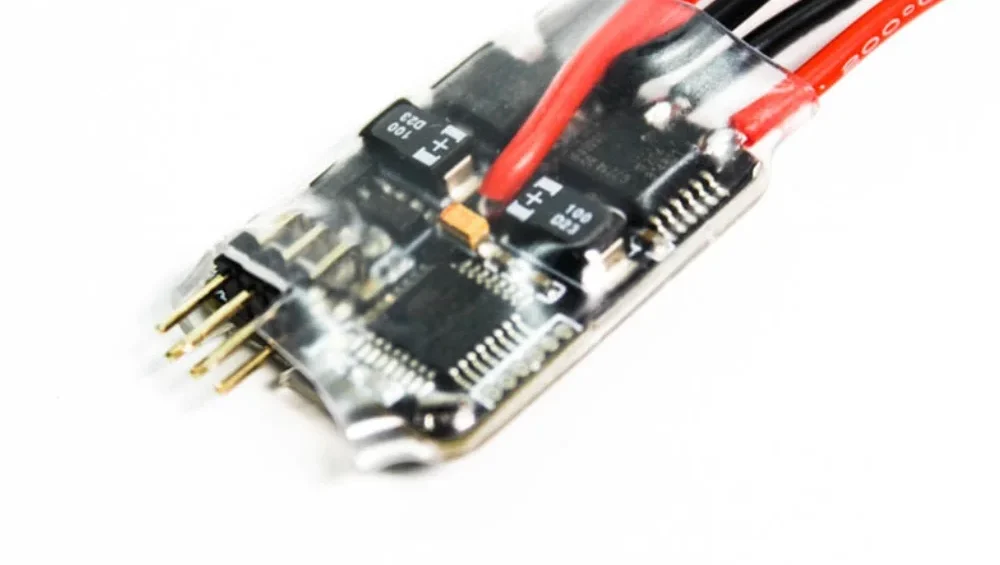
What are Brushless ESCs
Brushless ESCs are pretty cool devices that helps control brushless motors, which are used in all sorts of fun gadgets like drones and RC cars. Here’s the lowdown:
- Uses Electronic Commutation:
Instead of old-school brushes and a commutator, a brushless ESC uses electronic commutation. Basically, it handles the power flow with electronics, so there’s no physical contact, making things run smoother and last longer. - Has 3 Phases:
Brushless ESCs work with three-phase motors. This means they send power through three wires in a specific sequence, creating a rotating magnetic field that spins the motor. This setup helps with smooth and precise control. - High Frequency Current Switching:
These ESCs rapidly switch the current on and off at high speeds. This high-frequency switching lets the motor respond quickly and efficiently to your commands, whether you’re speeding up, slowing down, or changing direction. - Designed to Control Brushless Motor:
Brushless ESCs are made specifically for brushless motors. They take the signals from your controller (like a throttle or remote) and turn them into the precise power pulses needed to run the motor just right. This ensures everything runs efficiently and reliably.
In short, a brushless ESC is the high-tech brain that makes brushless motors so awesome, using smart electronic tricks to control the motor precisely and efficiently.
Still feeling confused? Here, let’s dive deeper into the advantages of both the ESCs over each other-
Advantages of Brushed ESCs over Brushless ESCs
Here’s why brushed ESCs are still rocking:
- Low Cost:
Alright, so brushed ESCs won’t burn a hole in your pocket like their fancy brushless cousins. They’re cheaper because they keep it simple with mechanical commutation instead of fancy electronics. If you’re watching your wallet, brushed ESCs are the budget-friendly choice. - Simple Design:
Brushed ESCs are like the LEGO sets of the motor world – easy to figure out and fix. With fewer electronic bits and good ol’ mechanical commutation, they’re perfect for folks who like to tinker. So, if you’re into DIY projects or just like to keep things simple, brushed ESCs are your jam. - Compatible with a Wide Range of Motors:
These babies are like the Swiss Army knives of ESCs – they work with pretty much any motor you throw at them. Whether it’s an old-school brushed motor or something more modern, brushed ESCs can handle it like a champ. That’s why they’re a go-to for all sorts of applications. - Smoother and Precise Low-Speed Control:
Need to make your motor purr like a kitten? Brushed ESCs are your best bet. They’re pros at keeping things smooth and steady, especially at low speeds. So, whether you’re into robotics or scale modeling, brushed ESCs will give you that precision control you crave.
So, if you’re all about saving cash, keeping it simple, and getting smooth low-speed action, brushed ESCs are the way to roll!
Advantages of Brushless ESCs over Brushed ESCs
Alright, let’s get into why brushless ESCs are the ultimate choice:
- Higher RPM:
So, brushless ESCs can rev up the motor faster than brushed ones. Think of it like hitting the gas pedal in a sports car – you get that instant boost in speed. - Higher Efficiency:
Brushless ESCs are like the energy-saving champs. Because they don’t have those clunky brushes causing friction, they’re more efficient. That means you can squeeze more power out of your battery without draining it as fast. - Smaller Size:
These brushless ESCs are like the compact superheroes of the electronic world. They’re smaller and lighter because they don’t need all that bulky brush gear. Perfect for squeezing into tight spaces or keeping your drone nimble. - Quiet Running:
Brushless ESCs are like the stealth ninjas of the motor world. They’re way quieter than brushed ESCs because they don’t have those noisy brushes rubbing against the commutator. So, if you’re into keeping things quiet, brushless is the way to go.
So yeah, if you’re all about speed, efficiency, compactness, and keeping things quiet, brushless ESCs are where it’s at!
Conclusion
So, to wrap things up, whether you go with brushed or brushless ESCs really depends on what floats your boat.
If you’re all about keeping it simple and saving some dough, brushed ESCs are the way to roll. They’re like the trusty old-school choice, perfect for DIY projects and offering smooth control at slower speeds.
But if you’re after speed, efficiency, and a sleek setup, brushless ESCs take the cake. These babies are like the high-tech superheroes of the ESC world, packing a punch with their higher RPM, efficiency, and compact size.
So, whether you’re cruising on a budget or aiming for top-notch performance, there’s an ESC out there to fit your needs. Just weigh your options, and happy motor controlling!
Click Here to buy the best ESCs for your motors now